Scharnierhebel-Horizontal-Endschalter

-

Robustes Gehäuse
-

Zuverlässiges Handeln
-

Verbessertes Leben
Produktbeschreibung
Die horizontalen Endschalter der RL7-Serie von Renew zeichnen sich durch hohe Langlebigkeit und Widerstandsfähigkeit gegenüber rauen Umgebungsbedingungen aus. Mit einer mechanischen Lebensdauer von bis zu 10 Millionen Schaltvorgängen eignen sie sich ideal für kritische und anspruchsvolle Anwendungen, bei denen herkömmliche Schalter nicht eingesetzt werden können. Der Scharnierhebel-Betätigungsschalter bietet eine größere Reichweite und flexible Betätigungsmöglichkeiten, was eine einfache Aktivierung ermöglicht und ihn perfekt für Anwendungen macht, bei denen beengte Platzverhältnisse oder ungünstige Winkel eine direkte Betätigung erschweren.
Abmessungen und Betriebseigenschaften
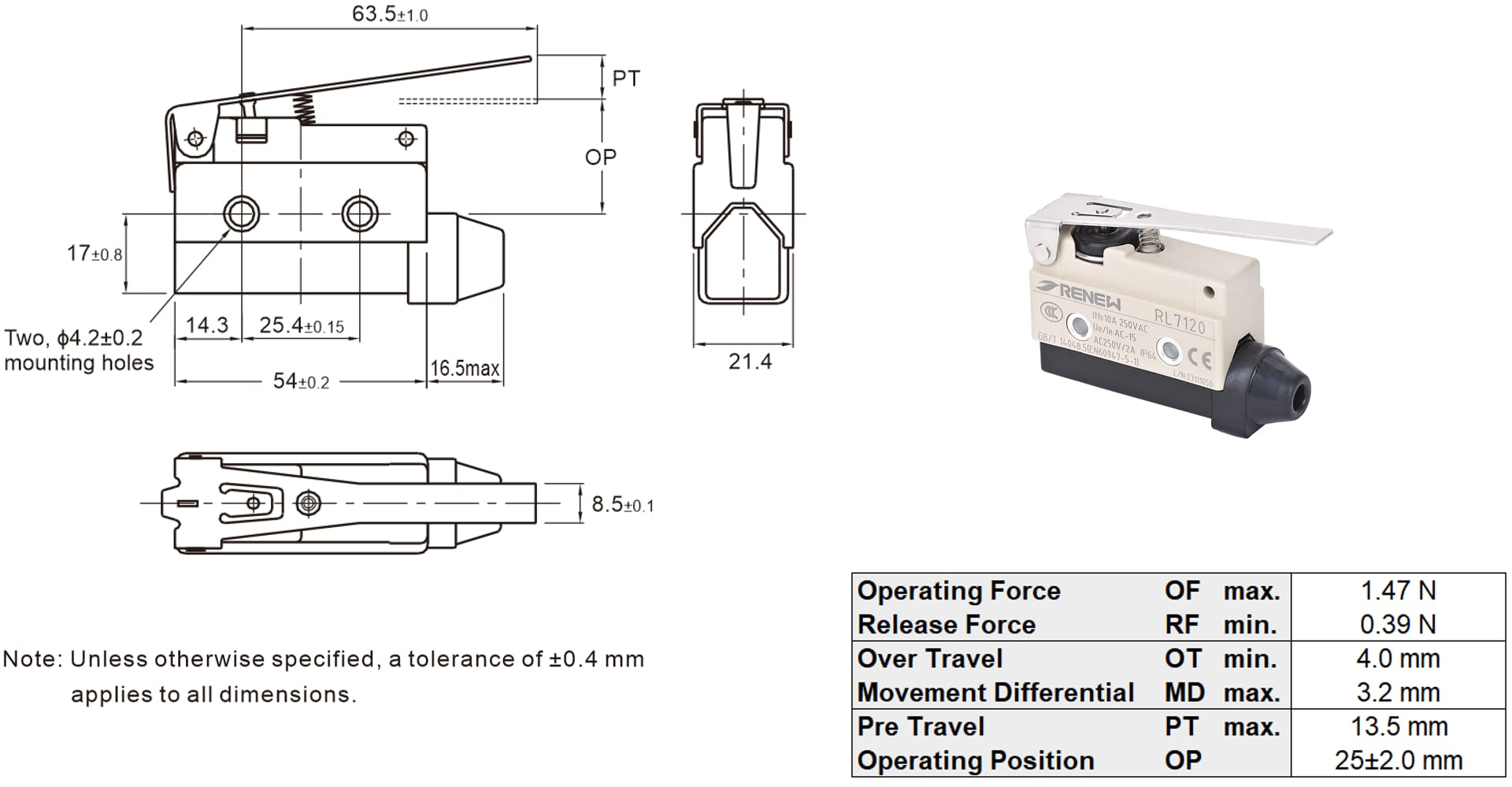
Allgemeine technische Daten
| Ampere-Nennwert | 10 A, 250 V Wechselstrom |
| Isolationswiderstand | 100 MΩ min. (bei 500 VDC) |
| Kontaktwiderstand | 15 mΩ max. (Anfangswert für den eingebauten Schalter bei Einzelprüfung) |
| Durchschlagsfestigkeit | Zwischen Kontakten gleicher Polarität 1000 V AC, 50/60 Hz für 1 Minute |
| zwischen stromführenden Metallteilen und Masse sowie zwischen jedem Anschluss und nicht stromführenden Metallteilen 2000 V AC, 50/60 Hz für 1 Minute | |
| Vibrationsfestigkeit bei Fehlfunktionen | 10 bis 55 Hz, 1,5 mm Doppelamplitude (Fehlfunktion: max. 1 ms) |
| Mechanische Lebensdauer | Mindestens 10.000.000 Operationen (50 Operationen/min) |
| Elektrische Lebensdauer | Mindestens 200.000 Schaltvorgänge (bei Nennwiderstandslast, 20 Schaltvorgänge/min) |
| Schutzgrad | Allgemeiner Einsatz: IP64 |
Anwendung
Die horizontalen Endschalter von Renew spielen eine entscheidende Rolle für die Sicherheit, Präzision und Zuverlässigkeit verschiedenster Geräte in unterschiedlichen Anwendungsbereichen. Hier einige gängige und potenzielle Anwendungsbeispiele.
Gelenkige Roboterarme und Greifer
Integriert in die Greifer des Roboterarm-Handgelenks, um den Greifdruck zu erfassen und eine Überstreckung zu verhindern, sowie integriert in Gelenkroboterarme zur Verwendung in Steuerungsbaugruppen und zur Bereitstellung von Endlagen- und gitterartiger Führung.













